Использование в видеонаблюдении детекторов движения стало уже обычным делом. Большинство современных камер видеоконтроля оборудованы такими детекторами, что позволяет контролировать появление в зоне обзора камер движущихся объектов. Это позволяет улучшить систему безопасности, выявляя мгновенно любые изменения в кадре и отправляя сигнал тревоги, если он настроен на движение.
Обнаружение движения даже применяется в мобильном видеонаблюдении, когда сигнал с камер поступает на смартфоны или планшеты, что уж тут говорить об обычном видеонаблюдении с использованием видеосерверов, регистраторов и ПК.
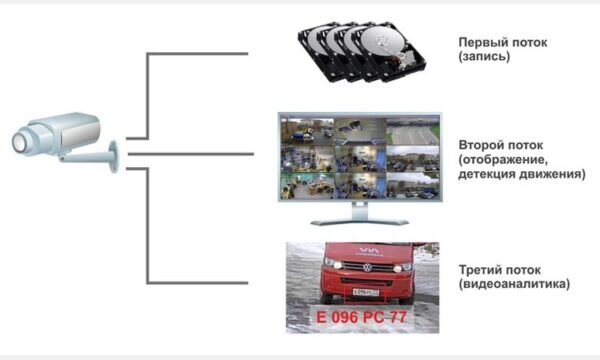
В этих системах детекция движения позволяет сэкономить дисковое пространство, когда запись видео включается в момент появления в кадре движущихся объектов, взамен постоянной записи даже совершенно статичных кадров, что очень быстро заполняет объем HDD.
Сегодня существует множество различных технологий, которые обнаруживают движение, однако в видеонаблюдении обычно используются только два метода PIR и CV. Рассмотрим их подробнее.
Анализ теплового излучения (PIR)
Этот метод обнаруживает тепло, излучаемое всеми живыми существами, поэтому данный метод также называют «тепловым зрением». Датчик срабатывает, когда обнаруживает движение объектов определенной температуры или различие в температурах объекта и фона. При срабатывании детектор подает сигнал, при котором камера видеонаблюдения включает запись, а пользователь получает сигнал тревоги, сообщающий о том, что в поле зрения камеры появился движущийся объект.
Компьютерное зрение (CV)
Этот метод основывается на использовании программного обеспечения, которое анализирует последовательные кадры на предмет их различий и сигнализирует об их обнаружении. Данный подход использует множество методов, которые зависят от нужного результата и технического предпочтения разработчиков.
Из этих методов одним из самых простых является поиск изменений пикселей в течение коротких периодов времени. Другой метод анализирует группы пикселей для распознавания движущихся объектов.
Все эти методы имеют общую конечную цель — обнаружение движения и, по возможности, определение формы движущегося объекта. После достижения этой цели могут применяться более современные методы классификации движущегося объекта (например, человека, животного, транспортного средства, дерева) для определения того, какие из них важны (например, человек или транспортное средство), а какие несущественны и могут быть проигнорированы (например, животное или дерево).
Фильтр детектора движения также выполняет определённые преобразования над растровыми данными, чтобы выделить необходимые элементы изображения и подавить остальные. После чего интересующие элементы регистрируются в качестве движущихся объектов и далее могут либо классифицироваться, либо сохраняться в базе данных движущихся объектов, либо отображаться на экране дисплея оператора в случае, если система не полностью автоматизирована и требует принятия решения человеком.
Таким образом, цепочка обработки данных детектором движения обычно строится из не-
скольких фильтров преобразования данных (предобработки) и собственно детектора дви-
жущихся объектов.
Таким образом по принципу работы детекторы движения можно разделить на три класса:
• Разностные (использующие вычисление попиксельных разностей).
• Контурные (основанные на обнаружении контуров объектов).
• Иные (в их основе лежат иные принципы, например, тепловое зрение или вейвлет преобразования).
Понятие объекта с точки зрения детектора движения несколько отличаться от того, что человек привык понимать под объектом, воспринимая глазом окружающие его предметы.
Выделяя объекты на изображении, человеческий глаз работает в связке с головным мозгом, который на текущий момент уже хранит достаточно информации о типах, форме, линейных размерах, цвете и прочих характеристиках, присущих тем или иным объектам, с которыми человек сталкивался ранее.
Работа по выделению объектов детектором движения, основанным на алгоритме вычисления попиксельных разностей между кадрами, начинается с анализа маски движения. Реальным объектам в ней обычно соответствуют пиксели (или минзоны), которые образуют связные группы, поэтому логично определить объект с точки зрения детектора движения как группу связных пикселей в маске движения.
Такому объекту соответствуют несколько параметров:
1) Линейные размеры минимального прямоугольника (в дальнейшем просто прямо-
угольник), который можно описать около пикселей группы.
2) Координаты (x,y) центральной точки прямоугольника. Будем считать данную
точку центральной точкой объекта.
3) Количество пикселей, входящих в группу.
4) Область маски движения, лежащая внутри прямоугольника.
5) Область текущего кадра, лежащая внутри прямоугольника.
Поскольку детектор обнаруживает только движущиеся объекты, эта группа пикселей и соответствующий ей объект с поступлением на вход детектора новых кадров будут испытывать смещение, поэтому кроме параметров, перечисленных выше, можно ввести ещё несколько:
6) Вектор, описывающий направление и скорость движения объекта.
7) Массив, содержащий координаты центра объекта на предыдущих кадрах.
8) Время жизни объекта, измеряемое в количестве кадров.
Выделение объектов происходит при последовательном обходе пикселей маски движения. Если в маске движения обнаружена единица, запускается процедура поиска пикселей, связных с данным, которым также соответствуют единицы в маске движения. Найденные пиксели помечаются, чтобы избежать повторного их обнаружения. Таким образом, наряду с выделением объектов сцены, человеческий мозг выполняет процедуру их распознавания, поэтому человек без труда различает известные ему объекты.
После того, как фильтр детектора движения уже способен обнаруживать и отслеживать движущиеся объекты, накапливая информацию о них, регистрируя их параметры, можно перейти к последнему этапу обнаружения: отсечению не интересующих объектов по их параметрам.
Самый простой тип возможной фильтрации объектов – по их линейным размерам. Данный тип фильтрации может использоваться для отсечения шума, который всё же может оставаться на изображении после всех шагов этапа предобработки и даже после проведения фильтрации операциями математической морфологии.
Для осуществления фильтрации данного типа необходимо задать минимальные и/или максимальные размеры объектов, интересующих пользователя. После чего все объекты, размеры которых будут выходить за допустимые рамки, будут отсекаться, не давая ложной тревоги. Помимо удаления остатков шума, это может быть полезно для исключения срабатывания системы охраны на птиц, животных (при задании минимально допустимых размеров) или на автомобили (при задании максимально допустимых размеров).
Кроме размеров, допустимыми рамками может ограничиваться скорость и направление движения объекта. Это может быть полезно при наблюдении за участком территории, на котором возможно появление людей, движущихся пешком, однако запрещён бег или быстрая езда на автомобиле, либо запрещено движение в определённом направлении.
Для выявления случаев тревоги здесь необходимо лишь сравнить скорость и направление движения объекта с запрещённым направлением и максимально допустимой скоростью. Кроме того, ситуацией, при которой возникает тревога, может быть простое нахождение объекта в определённой области кадра, которая является охраняемой и появление каких-либо объектов там запрещено. Задание такой области может осуществляться с помощью введения многоугольников, очерчивающих запрещённую зону. Это случай отсечения объектов по координате их центральной точки в кадре.
Подводя итог сказанному, отметим, что датчики PIR более надежны, чем видеокамеры наблюдения с компьютерным зрением, в том, что касается фильтрации несущественных движений. PIR является энергоэффективной технологией, которую часто используют в камерах с батарейным питанием. Если будет обнаружено движение, видеокамеры наблюдения переключатся в режим записи — на фиксированный период времени или до тех пор, пока движение не прекратится.
Однако маломощный режим датчиков PIR все же является их недостатком, так как видеокамерам может потребоваться больше времени, чтобы начать запись, чем камерам с компьютерным зрением.
Следовательно, можно пропустить начало события, которое вызвало предупреждение об обнаружении движения, например, приближение злоумышленника, когда его лицо было лучше всего видно. Они также не могут обнаружить движение через стекло, поэтому не подходят для наблюдения за двором с помощью внутренних камер, чьи объективы направлены на улицу.
Обнаружение движения с помощью компьютерного зрения обеспечивает идентификацию движущегося объекта с помощью расширенных функций видеоанализа (например, таких как обнаружение человека, распознавание лица). Поскольку такое обнаружение зависит от качества алгоритмов, оно более подвержено ложным тревогам.
Мы рассмотрели основные методы детекции движения, применяемые в видеонаблюдении. Все это теоретическая часть его, но знать на практике, как работает детекция, достаточно полезно, так как вы будете точно знать, какой метод детекции движения лучше применять в том или ином случае.
Ну а мы напоминаем, что наша компания «Запишем всё» с 2010 года занимается монтажом, модернизацией и обслуживанием любых систем видеонаблюдения, в том числе использующих детекцию движения, в Москве и Подмосковье.
Мы работаем быстро, качественно и по доступным ценам. Перечень услуг и цены на их вы можете посмотреть здесь.
Звоните +7 (499) 390-28-45 с 8-00 до 22-00 в любой день недели, в том числе и в выходные. Мы будем рады Вам помочь!